Компьютерное зрение
Мы создаем системы компьютерного зрения для робототехнических комплексов, систем контроля, сервисов сбора и интерпретации фото- и видеоинформации.
Разрабатываемые нами системы выполняют задачи:
- Поиска, классификации и подсчета объектов в поле зрения;
- Оценки параметров объектов;
- Анализа структуры и формы объекта;
- Выявления отклонений объекта от эталона;
- Локализации и оценки динамики объектов;
- Выявления аномалий;
- Выявления состояний и событий.
Мы применяем математические методы и алгоритмические решения с учетом особенностей конкретной задачи, свойств объектов и среды, обеспечивая гибкость решений в сочетании с эффективным использованием вычислительных ресурсов.
Системы способны производить обработку потоков нескольких источников одновременно, поддерживать параллельное выполнение процессов, сочетая высокую точность и скорость обработки видеоданных. Решения интегрируемы в смежные информационные системы с использованием стандартных протоколов обмена.
Прикладные решения
Система компьютерного зрения робототехнического комплекса
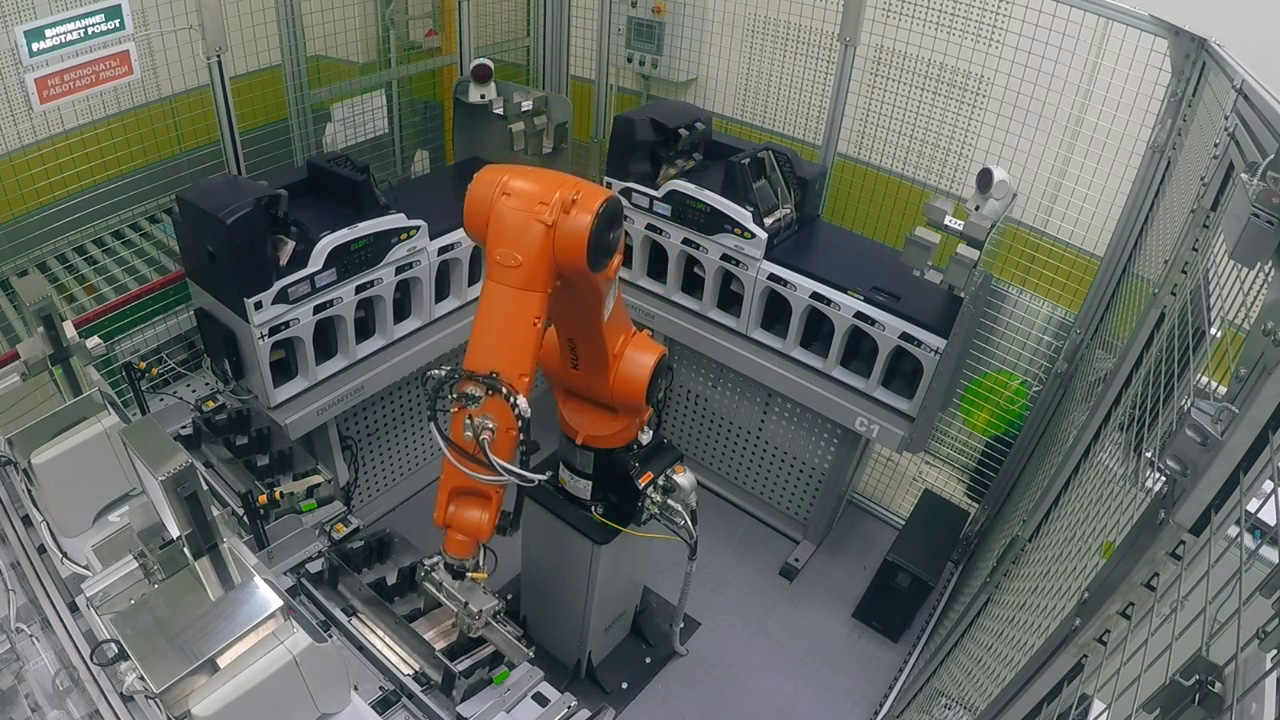 Робототехнический комплекс MonRo CashStream компании Квантум Системс предназначен
для повышения эффективности обработки больших объемов наличности в кассовых центрах банков.
Робототехнический комплекс MonRo CashStream компании Квантум Системс предназначен
для повышения эффективности обработки больших объемов наличности в кассовых центрах банков.
В состав комплекса входят:
- Промышленный робот-манипулятор;
- Счетно-сортировальные машины;
- Системы обандероливания;
- Мобильный транспортный робот;
- Системы подачи транспортных лотков.
Обработка банкнот в автоматизированном кассовом центре – многостадийный процесс, часть этапов которого выполняется с использованием программных модулей компьютерного зрения, разработанных для решения отдельных прикладных задач в рамках MonRo CashStream.
Модуль анализа состояния секций транспортных контейнеров позволяет оценить качество укладки банкнот в каждой секции контейнера и при необходимости приостановить последующую операцию загрузки банкнот в счетно-сортировальные машины роботом-манипулятором.
Модуль анализа состояния Reject-карманов счетно-сортировальных машин позволяет выявлять наличие дефектов формирования пачек отбракованных банкнот, необнаруживаемые датчиками счетно-сортировальных машин.
Модуль обнаружения частей ветхих банкнот позволяет избегать рассыпания пачек ветхих купюр за счет своевременной приостановки процесса перемещения пачек роботом-манипулятором в случае отделения фрагментов купюр.
Модуль определения координат транспортного контейнера позволяет корректировать траекторию робота-манипулятора с точностью до 1 мм в процессе автоматической разгрузки контейнеров транспортных роботов, перемещающих пачки банкнот на обработку.
Модуль выявления аномалий в рабочей области комплекса позволяет обнаруживать смещение конструктивных элементов комплекса и наличие посторонних предметов в рабочей области. Является дополнительной мерой обеспечения безопасного функционирования роботизированного комплекса.
Контроль ношения масок
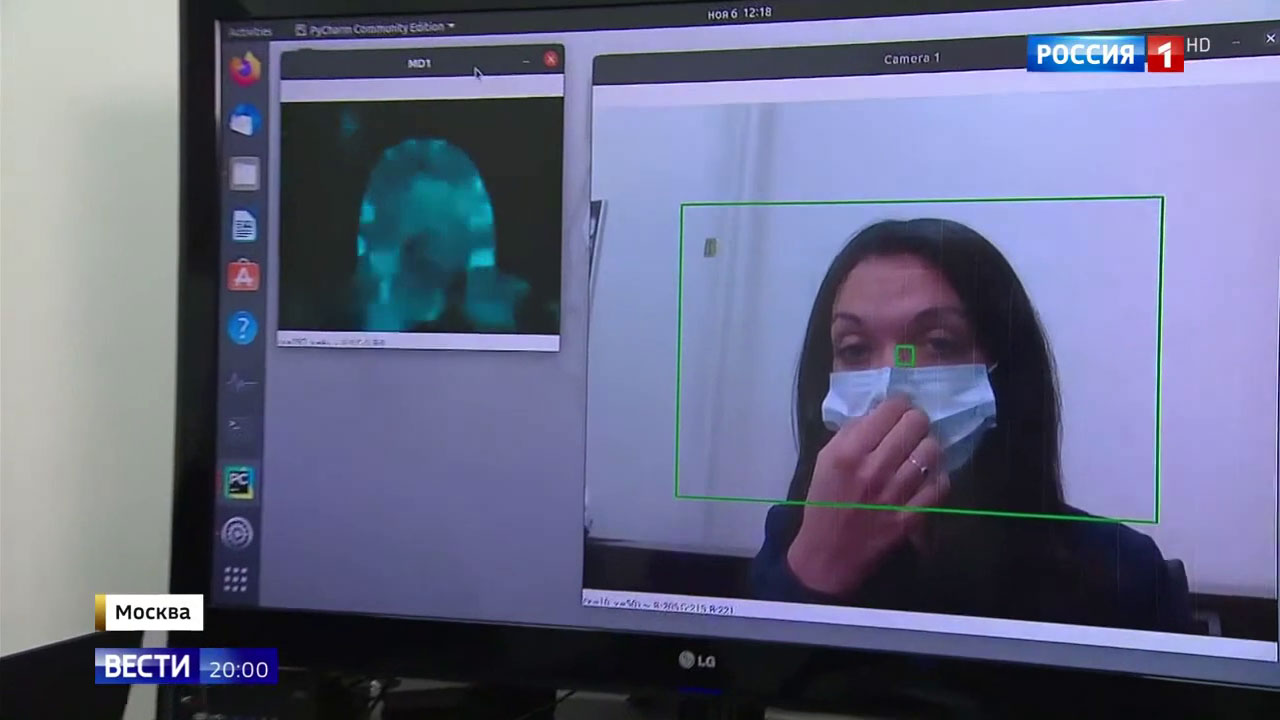 Решение предназначено для дистанционного оперативного определения наличия защитной маски на лице путем нейросетевого анализа видеопотоков,
получаемых от стационарных камер, сбора и анализа статистических данных.
Система обеспечивает дистанционный контроль соблюдения требований по ношению маски в условиях карантинных мероприятий,
направленный на снижение вероятности инфицирования сотрудников и посетителей учреждений в условиях пандемии,
эпидемий и распространения сезонных инфекционных заболеваний.
Решение предназначено для дистанционного оперативного определения наличия защитной маски на лице путем нейросетевого анализа видеопотоков,
получаемых от стационарных камер, сбора и анализа статистических данных.
Система обеспечивает дистанционный контроль соблюдения требований по ношению маски в условиях карантинных мероприятий,
направленный на снижение вероятности инфицирования сотрудников и посетителей учреждений в условиях пандемии,
эпидемий и распространения сезонных инфекционных заболеваний.
Система - инструмент своевременного оповещения о нарушениях (в тот момент, когда они происходят), позволяет принимать меры по устранению конкретного нарушения, еще до того, как оно придет к неблагоприятным последствиям.
Пользователем системы является само учреждение, заинтересованное в снижении риска заражения сотрудников и посетителей.
Система может настраиваться для решения смежных задач контроля за использованием средств индивидуальной защиты.
Распознавание фракций нерудных материалов
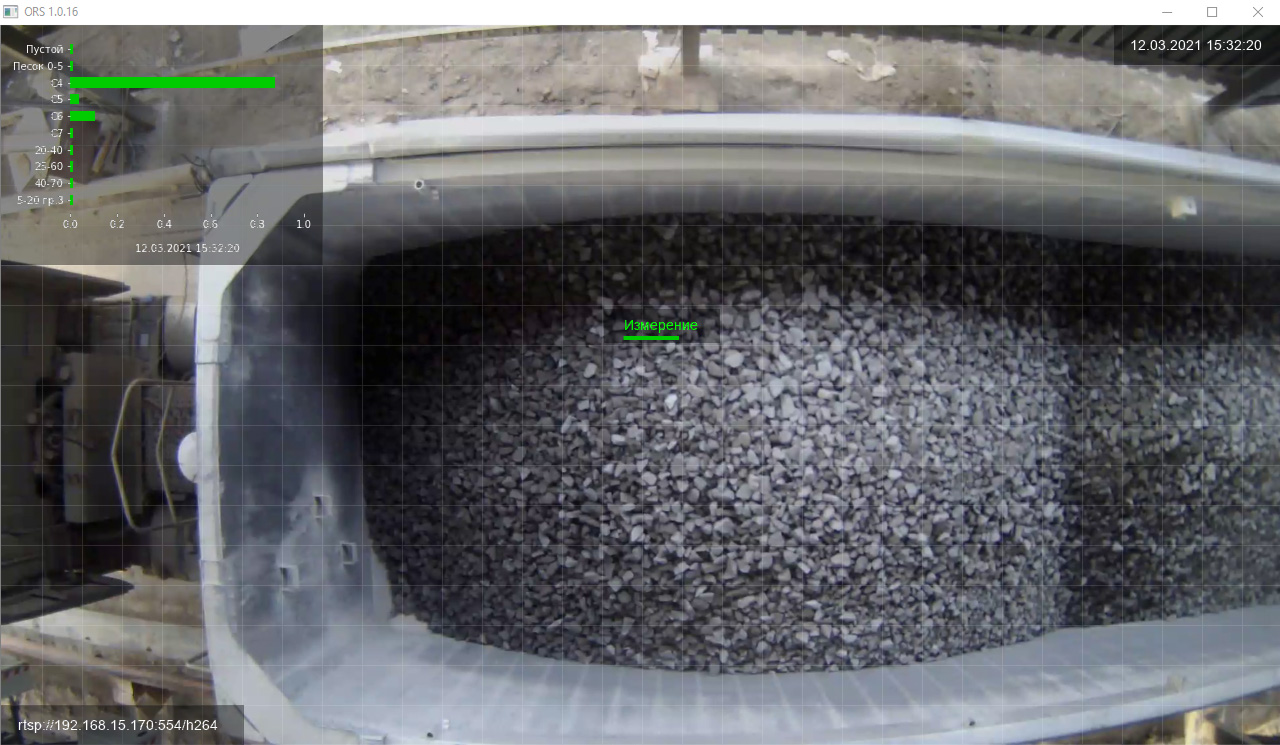 Решение позволяет осуществлять автоматизированную классификацию поверхностей нерудных материалов по заранее определенным классам фракций. Система решает задачу получения моментальной независимой оценки состава материала, не зависящей от человеческого фактора.
Решение позволяет осуществлять автоматизированную классификацию поверхностей нерудных материалов по заранее определенным классам фракций. Система решает задачу получения моментальной независимой оценки состава материала, не зависящей от человеческого фактора.
Источником данных служат изображения, автоматически получаемые в видимом и ИК-спектрах при помощи стационарных сетевых камер, устанавливаемых на пунктах взвешивания и контроля транспортных средств, осуществляющих перевозку нерудных материалов. Результатом распознавания фракций является целочисленное значение, определяющее принадлежность изображенной поверхности к классу фракций, а также оценка точности выполненной классификации.
Системой поддерживается обмен данными со смежными информационными системами, а также накопление статистических данных.
Контроль водителей
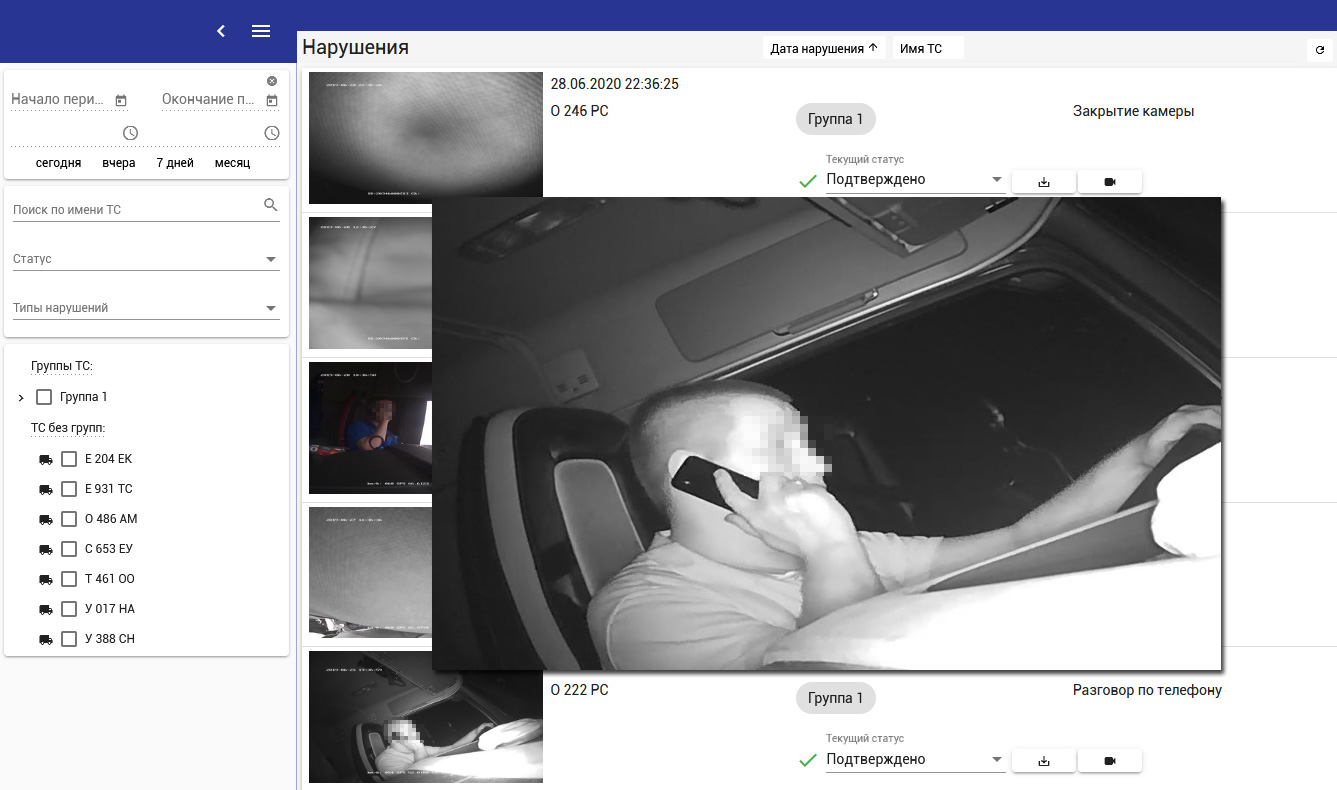 Решение позволяет автоматизировать выявление нарушений техники безопасности, допускаемых водителями при управлении автомобильным транспортом. В качестве основы системы используются нейросети, применяемые для анализа видеопотоков и видеозаписей, получаемых от установленных в кабине транспортных средств видеорегистраторов.
Решение позволяет автоматизировать выявление нарушений техники безопасности, допускаемых водителями при управлении автомобильным транспортом. В качестве основы системы используются нейросети, применяемые для анализа видеопотоков и видеозаписей, получаемых от установленных в кабине транспортных средств видеорегистраторов.
Системой распознаются события использования мобильных телефонов, курения, закрытия камер. Система автоматически находит и сохраняет соответствующие фрагменты видео и кадры, многократно сокращая время, затрачиваемое на выявление нарушений, позволяет осуществлять мониторинг соблюдения требований безопасности более полно и оперативно. Перечень выявляемых нарушений расширяем путем дообучения без внесения изменений в архитектуру системы.
По результатам обработки видеоданных системой формируются отчеты о нарушениях, доступные посредством веб-браузера, а также поддерживается автоматизированное формирование протоколов заданной формы по каждому нарушению.
Количественная оценка популяций по данным аэрофотосъемки
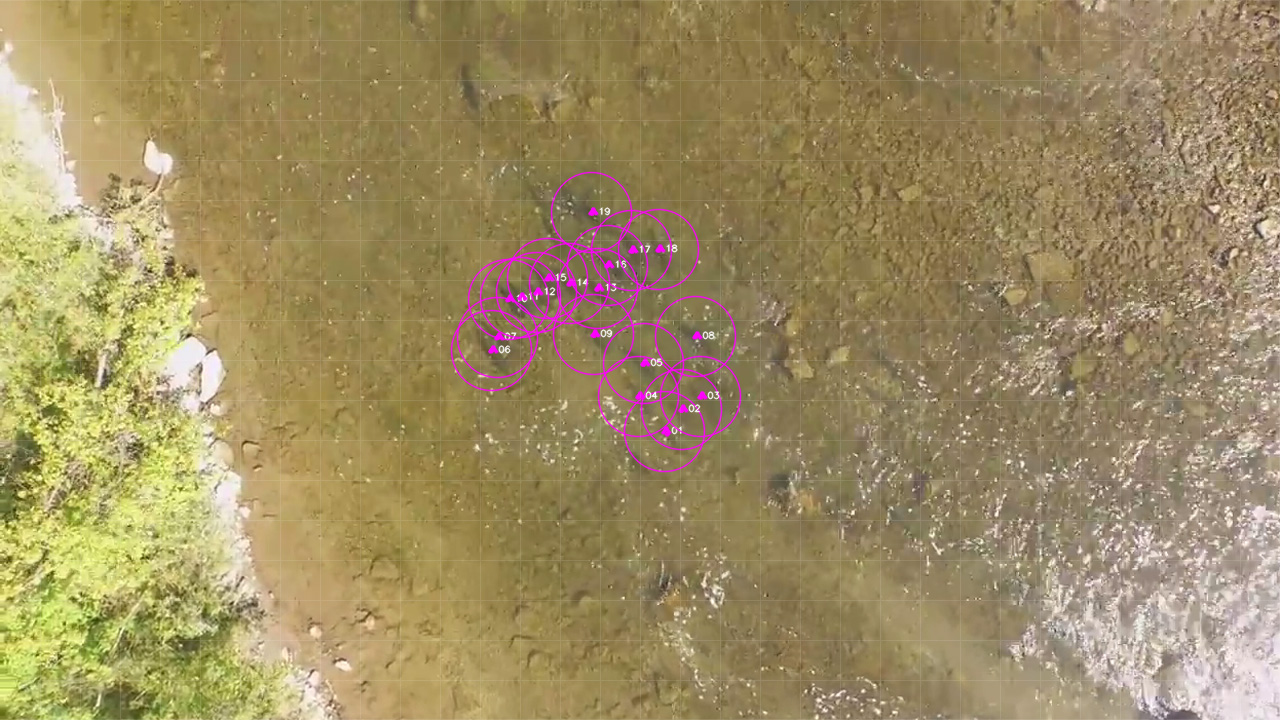 Решение позволяет выполнять анализ снимков местности, получаемых с применением автономных и пилотируемых летательных аппаратов, с целью автоматизации подсчета объектов заданных классов.
Решение позволяет выполнять анализ снимков местности, получаемых с применением автономных и пилотируемых летательных аппаратов, с целью автоматизации подсчета объектов заданных классов.
Входными данными модуля нейросетевого анализа системы служат последовательности изображений анализируемых сцен и метаданные, ассоциированные с конкретной сценой; результатом обработки изображений являются оценки количества заданных объектов и точности проведенного подсчета.
Система может использоваться как для обработки поступающих данных в реальном времени, так и анализа предварительно накопленных массивов. Система обучаема, а нейросетевые модели инвариантны относительно классов и могут применяться для обнаружения и подсчета визуально различимых объектов произвольных классов, как природного, так и искусственного происхождения.